
PLC绕线机在工业上有广泛的应用。随着技术的发展,绕线机的控制不断改进,技术人员描述了OMRON柔性控制器在高速绕线机上的应用。怡斯麦(ESM)电子的技术人员设计了基于ARM处理器和可编程控制器(ProgrammableLogic Controller, PLC)的绕线机控制系统来满足电动机精确绕制的技术要求。技术人员设计了基于PLC的绕线机自动控制系统,使用高速脉冲来控制步进电动机进行绕制。我们给出了基于交流伺服控制的DSP TMS320LF2407、运动控制芯片JRMCK201和步进驱动的绕线机系统。我们研究了基于PLC DVP14SS11T2和变频器VFD015M21的绕线机控制,但是未讨论输入至变频器的模拟信号对绕制角速度的控制。我们讨论了最大基频时分层控制的优化问题。我们采用电子感应器和单片机来调节阻尼力矩,结合简单的强直结构设计,绕线机可以实现自适应的张力调整。我们采用了脉冲组合算法来解决特定情况下的绕制同步问题。我们中介绍了高速绕线机的设备监控系统的应用。我们研究了线性感应电动机考虑主要边缘效应的鲁棒非线性控制;我们研究了线性电动机在机械弹性情况下的自适应非线性速度控制。我们采用内、外拉杆同步往复和交错变换漆包线头装夹位置的方法,解决了扼流圈主要依靠人工绕制的问题。我们研究了细微线空心绕线机,并阐述了复合排线的原理。我们研制了一种基于矢量变频技术的专用恒张力绕线机,用于超导线圈的绕制。我们利用57-200 PLC和触摸屏在普通车床上完成了绕线机的电气系统设计与开发,使绕制质量和精度得以提高。我们对转子绕线机控制系统进行了数学建模和Simulink仿真,从而确定了调节系统的参数。
利用S7-PLC和M4控制器设定绕制的线速度、最大角速度、每层的匝数、绕制的层数、初始绕制半径和绕线的直径等参数,体现了对不同绕制情况的柔性以及由此而来的应用的宽泛性,绕制的角速度自适应于绕制半径的改变,绕制进程更加平滑和稳定,具有更好的绕制质量。

1、全自动绕线机系统结构
全自动绕线机的系统结构如图1所示。由图1可见,该系统由绕制轮及其驱动电动机、M4变频器、核心的PLC控制器、成形支架和相关的步进电动机等组成。
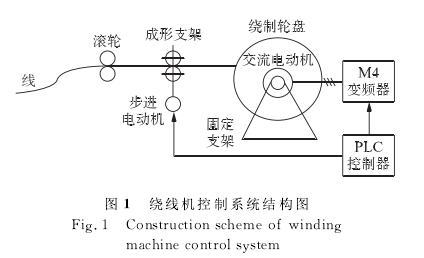
全自动绕线机运行时由交流电动机驱动绕制轮盘,交流电动机由M4变频器控制。为使绕制过程平稳进行,绕线的线速度需保持恒定,每一层绕线的角速度的变化。
2、自适应控制设计
2. 1 M4变频器的参数选用与设置
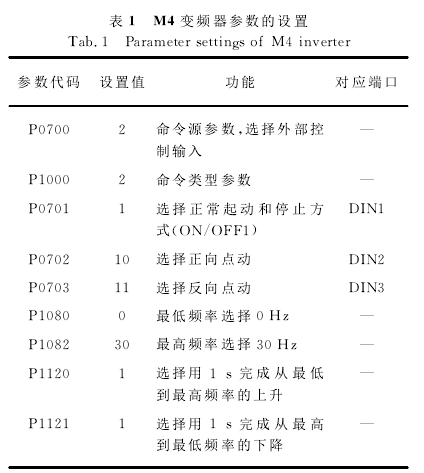
全自动绕线机在运行时,要求线速度保持恒定,故每一层绕线的角速度则必须发生变化。由于驱动绕制轮盘的M4变频器的控制输入是模拟量,故该模拟量在每一层是不同的。本文实现设计控制的M4变频器的参数设定如表1所示。同时,将选用电动机的各额定参数写入M4变频器的P0300~P0314参数中。
更多关于变频器全自动绕线机自适应控制研究,请下载附件:![]()
3、结语
针对全自动绕线机的控制,本文研究了一种基于可编程控制器PLC和M4变频器驱动的控制系统。
该系统保持绕线的线速度不变,每一层的绕制角速度不变;换层时,绕制的半径发生改变,角速度自适应于绕制半径的调整,输出给M4变频器的自适应模拟控制输入,由程序完成计算调整以控制角速度,同时,一层的绕制时间也随之调整。依据系统的结构图和自适应控制的流程要求,设置了变频器的控制参数,设计了自适应控制程序并下载至57-300 PLC进行仿真调试,验证了基于PLC和M4变频器驱动的绕线机的自适应控制方法是可行的。
 怡斯麦中文站
怡斯麦中文站 怡斯麦英文站
怡斯麦英文站