
变压器全自动绕线机的控制系统,包括倍福控制系统、绕线机三个轴的伺服系统和张力控制的伺服系统三部分。
(1) 倍福控制系统
倍福控制系统主要显示了需用到的各个模块,其中包括倍福工业PC、客户端软件、耦合器和扩展模块。扩展模块中的数字量输入模块的I\O接口连接各轴限位、零点和手动/自动档等,模拟量输入模块的I/O接口连接张力传感器。
(2) 绕线机张力控制的伺服系统
变压器全自动绕线机的张力控制系统包括导线的张力控制和绝缘带的张力控制,张力传感器将压力值,通过算法换算成张力大小,倍福的模拟量模块和PC间的通讯将张力的大小显示在人机交互界面中;伺服系统通过EtherCAT通讯控制缠绕张力值的大小。
(3) 绕线机三个轴的伺服系统
绕线机三轴的伺服系统包括伺服驱动器和伺服电机,通过EtherCAT总线和倍福工控机通讯,每个驱动器也通过EtherCAT总线连接通讯,实现对缠绕机三个轴的电机的控制,从而控制各轴到达指定位置。
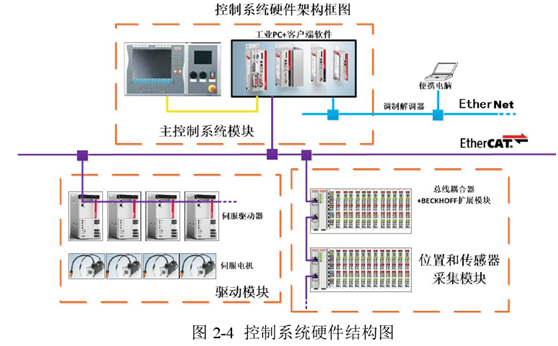
1、变压器全自动绕线机控制系统的硬件设计
本文设计的自动变压器绕线机控制系统的硬件结构图如图2-4所示,该控制系统由主控制系统模块、驱动模块以及位置和传感器采集模块构成。其中,主控制系统模块包括倍福工业PC和客户端软件,用来给变压器全自动绕线机发布指令;驱动模块包括伺服驱动器和伺服电机,用来控制变压器全自动绕线机各轴运动;位置和传感器采集模块包括总线耦合器和倍福扩展模块,用来检测变压器全自动绕线机各轴位置和线缠绕端以及带缠绕端的张力值。该控制系统应用EtherCAT总线通讯,将倍福工控机和驱动模块联系起来。通过指令可以控制伺服系统的运动,在倍福的人机交互界面显示各轴的运动状况。
(1) 张力执行机构
本文在自动排线控制系统中选取的主要执行机构为交流伺服电动机。交流伺服系统硬件结构简单,速度控制特性良好,在整个速度区内可实现平滑控制,几乎无振荡,90%以上的高效率,发热少,高速控制,高精确度位置控制(取决于编码器精度),额定运行区域内,可实现恒力矩,惯量低,低噪音,无电刷磨损,免维护(适用于无尘、易爆环境)。适用于要求启动频繁,且响应迅速的控制场合,可以满足绕制排线,排带时轴快速换向的要求。变压器绕制成型工艺中,主轴的转速为0~300rpm。本文的执行机构具有放卷和收卷的功能,而交流伺服电机既能提供一定的阻力矩产生张力,同时它的-12-空载转速也允许具有快速反向收卷的能力。根据要求,选取了松下电工的A5系列的MCDHT3520CA1伺服驱动器配合MHMJ082G1U伺服电机,输出功率为750W,3相200V,17位增量编码器保证反馈精度,额定转速位3000r/min,额定转矩2.4N•m,最大转矩7.1N•m。满足实际生产对张力及速度的需要。利用编码器能对主轴的旋转圈数进行精准计数,本控制系统采用的旋转编码器为欣灵电气公司生产的CHB25S-N/E型,性能参数为供电电压DC5V~24V,外径φ25mm,轴径φ4mm,最高转速为6000rpm。
(2) 张力控制单元
变压器全自动绕线机倍福控制系统,如图2-5所示,其中包括倍福工业PC、客户端软件、耦合器和扩展模块。扩展模块中的数字量输入模块型号为EL1008其I\O接口连接各轴限位、零点和手动/自动档等。模拟量输入模块型号为EL3001其I/O接口连接张力传感器。

选取KCS59-75-S0-P型超低摩擦气缸控制缓冲摆杆的摆动位置,性能参数为缸径59(mm),最大力距15(Nm),适用范围0.01~0.7MPA,使用TYPE550-ACD型号的电气转换器,性能参数为电源频率50~60Hz,复杂能力为50Ω,通过与超低摩擦气缸连接,调整气缸内的气压,从而调整摆臂的配重,实现对材料上张力的调整。
(3) 张力检测装置
本文使用压变传感器作为反馈式张力闭环的检测机构,压变式传感器实时检测张力波动形成张力闭环控制,调节缠绕张力使其值保持恒定,选用天津丽景微电子设备有限公司的TR50张力传感器,额定输出电压0~10V,综合误差±0.3%,非线性±0.3%,滞后±0.1%,来保障缠绕张力检测的精确性。
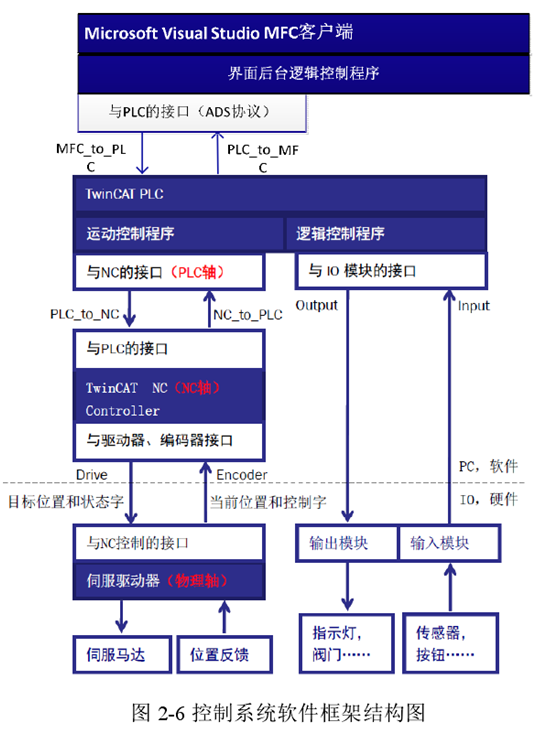
2、变压器全自动绕线机控制系统的软件设计
本文设计的变压器全自动绕线机控制系统软件框架如图2-6所示,客户端软件与倍福TwinCAT控制程序以ADS协议交换指令和数据,能够快速实现通讯指令的相互发送和接收,TwinCATNCPTP把一个电机的运动控制分为三层:PLC轴、NC轴和物理轴,PLC程序中定义的轴变量,叫做PLC轴,在NC配置界面定义的AXIS,叫做NC轴,在IO配置中扫描或者添加的运动执行和位置反馈的硬件,叫做物理轴。PLC程序直接读写所指示灯、张力传感器连接的输入模块和输出模块的Input和Output变量,就可以控制这些普通的IO设备。而PLC程序控制伺服电机时,必须经过运动控制器(即TwinCATNC):PLC轴发指令给NC轴;NC经过换算再发指令给伺服驱动器。
在绕线机工作前,首先要将各轴运动到零点位置,倍福工控机发送总线指令和运动参数到相应的伺服电机驱动器;回参后工作人员在客户端界面启动机器,等待缠绕完成。本文设计的控制系统采用TwinCATNC控制伺服驱动器和电机与PLC控制伺服驱动器和电机的主要区别在于:
当使用PLC控制时,如果电机既要定位又要定速,那么伺服驱动器必须工作在位置模式下。如果是模拟量控制伺服驱动器要实现位置控制,必须在PLC中自行编写位置环的PID算法。PLC向伺服发送启动命令之后,就只能等待其执行成功或者失败的结果。另必须提前预设驱动器参数,比如电机的速度、加速度、加加速度等,无法在运动指令中设置速度或者PLC程序中需要自行编写硬件接口变量的处理代码,比如单位换算、位置过零处理等,不同的硬件程序不同。多轴联动实现困难,适用于简单的单轴定位或者定速运动。
采用TwinCATNC控制伺服驱动器和电机由于使NC的SetPointGenerator,伺服驱动器必须工作在CyclicPosition或者CyclicVelocity模式下。两种模式下,NC都可以控制电机做定位或者定速运动。NC每个控制周期都向伺动器发送目标位置或者目标速度,所以运动过程中也可以修改速度或者加速度,甚至中断当前的运动触发其它动作,控制更加灵活。NC处理与硬件接口相关的运算,比如单位换算、位置过零处理等,不同的伺服驱动器PLC程序可以相同。方便地实现多轴联动,无须在伺服驱动器内部特别设置或者编程,所以硬件的互换性较强,维护简便。
 怡斯麦中文站
怡斯麦中文站 怡斯麦英文站
怡斯麦英文站