
1、自动绕线机伺服电机
伺服电机属于控制自动绕线机电机的一种,分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
相对于直流伺服电机,交流伺服电机没有电刷和换向器,因此工作可靠,维护和保养相对容易。惯量小助于提高系统快速性,适用于高速大力矩状态,而且与同功率的直流伺服电机想比体积和质量较小。此外交流伺服电机采用正弦波控制,转动脉动较小。
交流伺服电动机定子的构造基本上与电容分相式单相异步电动机相似.其定子上装有两个位置互差90°的绕组,一个是励磁绕组,它始终接在交流电压上;另一个是控制绕组,连接控制信号电压。
交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。
在自动绕线机控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。交流伺服电机的控制精度,取决于编码器的精度(线数),一般工业用伺服电机的编码器大概为(131072)的分辨率。

2、自动绕线机伺服驱动器
自动绕线机伺服驱动器是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流电机,属于伺服系统的一部分。目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。 功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。经过整流好的三相电或市电,再通过三相正弦 PWM 电压型逆变器变频来驱动三相永磁式同步交流伺服电机。功率驱动单元的整个过程可以简单的说就是 AC-DC-AC 的过程。整流单元(AC-DC)主要的拓扑电路是三相全桥不控整流电路。
伺服驱动器一般可以采用位置、速度和扭矩三种控制方式,根据系统所采用的控制器不同来择相应的控制方式。
对于扭矩控制方式,扭矩指令的输入范围为 0-±10V,表示力矩从 0 到额定转矩之间的变化,依据控制电压的大小,达到控制电机输出力矩的目的。
对于速度控制方式,同样转速指令的输入范围为 0-±10V,表示速度从 0 到额定转速的变化,依据控制电压的大小,达到控制电机输出速度的目的大小。
对于位置控制方式,位置指令包括 CCW/CW 脉冲,A/B 相,脉冲+方向三种输入方式,依据输入脉冲的数量,达到控制电机位置的目的。
自动绕线机伺服控制总的功能框图如图 3.5 所示。
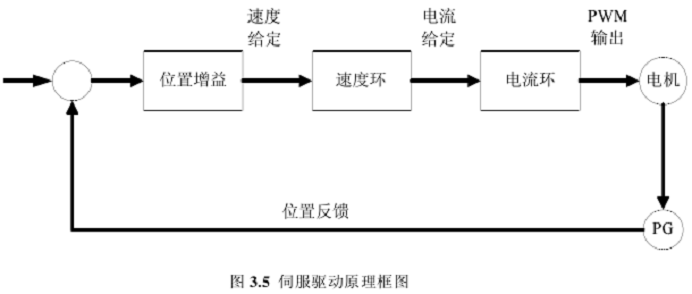
自动绕线机伺服控制过程,主要包括了三个环,分别是位置环,速度环和电流环,位置给定首先由位置环转换成速度环的速度给定,速度环根据前级输入的速度给定,输出电流给定,电流环接收速度环的输出,最终调节系统的 PWM 输出实现对电机旋转量和速度的驱动。同时编码器实时采集电机的旋转量,并反馈与位置给定进行比较形成闭环控制。
电流环的输入是速度环 PID调节后的电流给定,然后电流环的这个给定和“电流环的反馈”值进行比较后的差值在电流环内做 PID 调节输出给电机,“电流环的输出”就是电机的每相的相电流,“电流环的反馈”不是编码器的反馈而是在驱动器内部安装在每相的霍尔元件(磁场感应变为电流电压信号)反馈给电流环的。
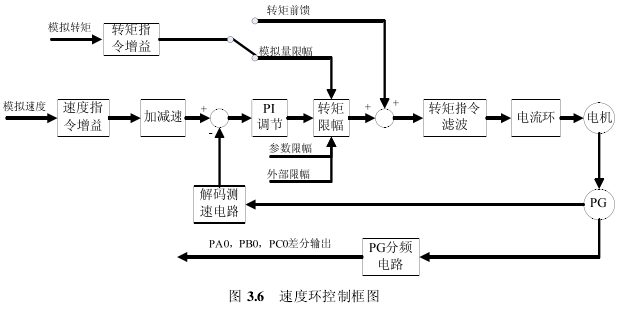
速度环用来检测电机的旋转速度是否依照指令旋转,相对于控制装置所提供之指令,速度环控制电机的旋转速度。如图 3.6 给出了驱动器中速度环的控制结构框图。位置环接收位置环输出的速度给定,通过速度指令增益对模拟速度信号进行放大,同时进行加减速识别,形成速度控制量,经过 PI(比例积分)控制器输出电机的控制转矩,并通过转矩限幅单元对输出的转矩控制量进行限幅控制,再经过转矩指令滤波器对最终的转矩进行滤波最为电流环的输入给定输出。与此同时编码器实时采集电机的旋转角度,测量得到的脉冲信号再经过解码测速电路对电机进行测速,然后将其变送为反馈的速度信号与给定的速度控制量进行比较,将两者之间的差值进行 PI 控制,最终实现速度闭环控制。
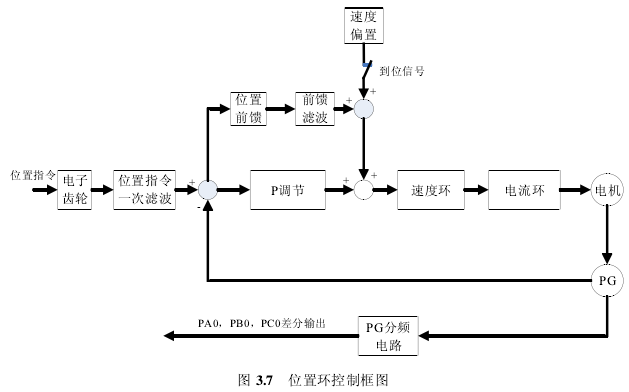
位置环是用来检测由控制器所输出位置控制指令之后,伺服电机是否移动至指令位置。相对于位置指令值,当检测值过大或过小时,控制伺服电机移动其误差值的部分,达到定位之目的。具体控制结构框图如图 3.7 所示,在主控制环中,位置指令通过电子齿轮和位置指令一次滤波,作为该环节 P(比例控制器)的输入给定,然后经过 P 控制器将控制指令转换为速度环的输入给定输出到速度环,再由速度环传递到电流环,最终由电流环输出驱动电机旋转,同时编码器实时采集电机旋转角度并反馈,与输入给定值进行比较形成偏差控制信号送入 P(比例)控制器进行偏差控制,最终形成位置闭环控制系统。
平滑功能是对脉冲指令进行加速度/减速度处理,在以下几种情况下使用:
1) 上位机无加速度/减速度功能
2) 脉冲指令频率太低
3) 电子齿轮比太高(超过 10/1)
前馈功能缩短定位时间。前馈将使实际运动轮廓逼近指令运动轮廓。通常前馈增益设定在 80%以下,对于大多数机械,设定超过 80%将会引起振动,使用前馈滤波可以减小振动。
通过分配偏置(设定偏差脉冲)到速度指令输出可以减小最终的定位时间。该功能将使实际运动轮廓逼近指令运动轮廓。
 怡斯麦中文站
怡斯麦中文站 怡斯麦英文站
怡斯麦英文站