
高压变压器产生的电压通常在50kV~400kV,是X射线探伤机中一个很重要的器件。变压器质量的好坏直接影响着变压器产品的质量和性能,所以对变压器绕线机的要求比较高。
变压器线圈的绕制要求比较多,如下:①匝数多;②线细;③绕组必须排列整齐;④不能交叉和有叠层;⑤漆包线的绝缘层绝对不能有破损;⑥匝数要准。
根据以上要求采用普通绕线机很难完成任务要求,为此有必要专门研制用于绕制X射线机上高压线圈的自动化设备,我公司就有这一款产品。
目前,绕线机控制系统的硬件部分多数采用PLC为控制器,少数采用单片机为控制器兼顾成本和性能要求,现采用嵌入式技术方案(ARM)构建控制系统,绕线机采用自动工作方式。
以下详细说明我公司变压器线圈绕线机的工作原理,检测电路、显示电路、键盘、电源监控、存储器电路、步进电机驱动电路等硬件的设计原理和实现方法,并给出软件设计的主程序流程框图。
绕制高压线圈的骨架固定在绕线机的主轴上。操作员手动启动主轴的电动机(变频器驱动),通过接在变频器上的调速电位器手动控制主轴转速(绕线速度)。骨架随主轴一起旋转,从而将漆包导线缠绕其上。盛有漆包导线(线轴)的排线架,由丝杠带动它移动,主轴转一圈,LPC2132单片机自动启动驱动丝杠的步进电机工作一次,排线架每次向前移动漆包导线一个线径宽的距离(操作员可以根据绕制的线径大小预先设置的参数,即步长参数)。控制系统自动协调排线架的移动与主轴的转动,从而避免发生叠层绕线的问题。当骨架一层缠满后,操作员手动降低主轴电机转速直到停止,操作员在绕组上包一层绝缘纸,手动改变步进电机运动方向(层与层间的绕线,送线器水平方向运动相反)后,启动主轴的电机,再绕骨架下一层的漆包导线。由于绕线机自动缠满一层,还需人工包一层绝缘纸,所以绕线机采用的是半自动化工作方式。
控制系统以单片机为控制核心。它有三种工作状态(检测控制、手动控制、设置参数),由按键设定,且有指示灯提醒工作状态。系统上电时,先自动进人检测控制工作状态。
(1)检测控制工作状态。绕线机的主轴上装有一个检测块(包括两个传感器,用于判断主轴运动方向和检测圈数)。当系统工作状态设为检测控制时,系统以外部中断方式开始检测两路脉冲。不断传来的脉冲信号,通过整形后,送给单片机,经过换算后做累计并存到存储器中,且其累计值不断在屏上显示,显示的值就是线圈绕制的圈数。单片机根据采集到两个传感器脉冲的各自时序信息,能判断出主轴的旋转方向(骨架是绕线还是放线),确定匝数累计值的增(减)运算。
(2)手动控制工作状态。当绕制过程中,出现断线和叠层等情况时,需要手动修整。将系统设为手动控制工作状态,单片机继续采集主轴脉冲信息,显示绕制的圈数,但步进电机的启动由操作员通过按键控制。主轴上装有手动绕柄,操作员可绕动主轴带动骨架绕线或放线,实现手动修整、绕线的功能。
(3)设置参数工作状态。当系统工作状态设为设置参数时,系统关闭采集脉冲的外部中断,单片机停止接受脉冲,操作员通过面板上的按键设置各种参数并放到存储器中,它们分别是圈数清零值、绕制的圈数值和步长值。
绕线机主要完成如下功能。
①查按键,转换系统工作状态;
②检测两路脉冲信号,根据脉冲时序,并累计、显示绕线圈数;
③在检测控制工作状态时,自动控制步进电机的运行,每次运行一个步长;
④在设置参数工作状态时,将参数值写到存储器中并显示;
⑤“喂狗”。
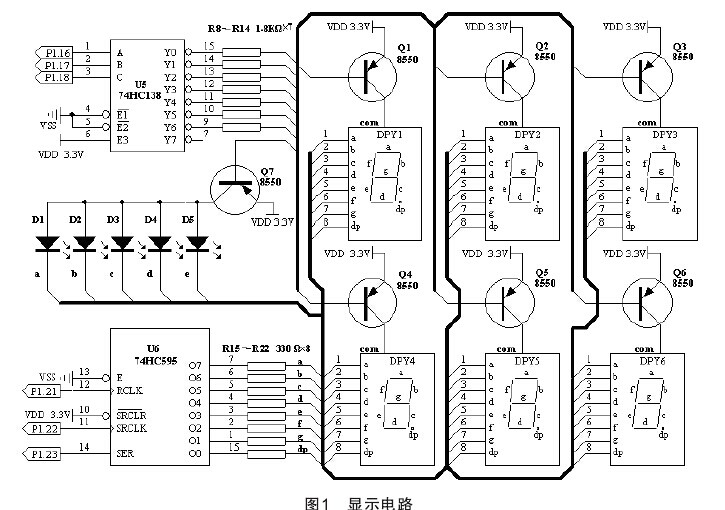
(2)显示电路。显示电路如图1所示。它实现两种功能:工作状态显示和数值(字)显示。
状态显示电路主要由芯片US和U6、电阻R14~R19、三极管Q7和发光二极管D1~DS组成,功能是实现检测控制、手动控制、绕线圈数清零、修改绕线圈数、设置步长值这五种工作状态指示。
数值(字)显示电路,它由芯片US和U6、限流电阻R8~R13和R15~R22、三极管Q1~Q6,数码管DPY1~DPY6组成。74HC138是三/八译码器,与LPC2132的P1.16~P1.18端口相连,实现数码管的位选。74HC595有8位移位寄存器和一个存储器,具有三态输出功能。它与LPC2132的P1.21~P1.23端口相连,实现数码管的段选。LED为共阳极数码管,型号是LN3161BS。数值(字)显示电路的主要功能是在不同的工作状态下,实现对应(各种)的数值(字)显示。它们分别是累计的圈数值、修改的参数值。
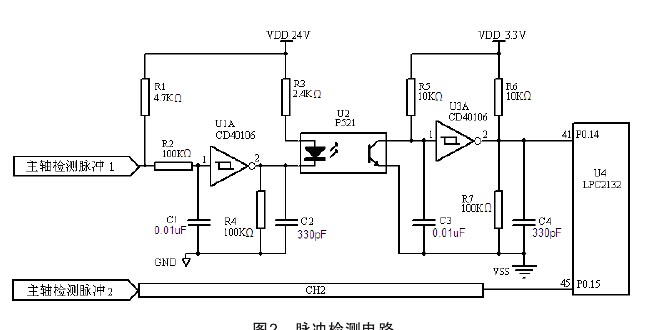
(3)脉冲检测电路。脉冲检测电路如图2所示,功能是完成两路脉冲检测。两路脉冲检测电路结构完全相同,下面以第一路为例进行介绍。
它由电阻R1~R7、电容C1~C4, U1,U2和U3组成。电路中的施密特触发器CD40106的作用是消除传输线上的躁声,对脉冲波形进行整形,使它变成理想方波;电路中的光电荆合器P521的作用是在信号传输的同时,抑制尖脉冲和各种噪声干扰,增强系统抗干扰能力。两路检测脉冲的传感器都选用型号为LJ 12A3-4-2/BX的传感器,工作电压是10~24V,本系统用24V为其供电。
(4)键盘电路。键盘电路由K1和K2两个按键、0~9十个数字键和上拉电阻组成。
①K1键,系统工作状态键,功能是点动K1键,转换系统工作状态。
②数字键,修改0~9数据的键,功能是操作数字键,先输入的是个位数值,再次操作数字键,输入的是十位数值。依次类推,百位、千位、万位、十万位。修改完十万位,若再次操作数字键,重新开始输入数据,先个位,后十位,循环(重复)上一个过程。
OK2键,点动/确认键,功能是若执行点动功能,点动控制步进电机的运行;若执行确认功能,确认输入数据有效,并将数据存到CAT1025JI-30中。
(5)存储器电路、电源监控、系统时钟。
①存储器电路。存储器选用带IZC存储器的电源监控,芯片CAT1025JI-30,用来存储绕线圈数值和步长值两个内容参数。
②电源监控。LPC2132单片机有看门狗功能,也含有上电复位和掉电检测电路,但由于ARM芯片的高速、低功耗和低电压,导致其噪声容限低。对电源的纹波、瞬态响应性能、时钟源的稳定和电源监控可靠性,提出了更高的要求。为提高系统抗干扰能力,在电路中设计了电源监控芯片CAT1025JI-30,它的2引脚和LPC2132的复位脚57相连。当需要手动复位时,按下按键,给CAT1025JI-30的引脚一个低电平,CAT1025JI-30的2引脚立即输出复位信号,使LPC2132单片机复位。
③系统时钟电路。系统时钟电路由两个电容和品振组成。品振选用的频率为11.0592MHzo
(6)步进电机电路、主轴电机电路、电源。
①步进电机电路。
驱动丝杠运行的步进电机,选用的型号是BSHB368o
步进电机驱动器,选用的型号是Q3HB64MA。它是等角度恒力矩细分型驱动器,工作电压为DC12~40V,电流在5.8A以下,定位精度最高可达60000步/转。
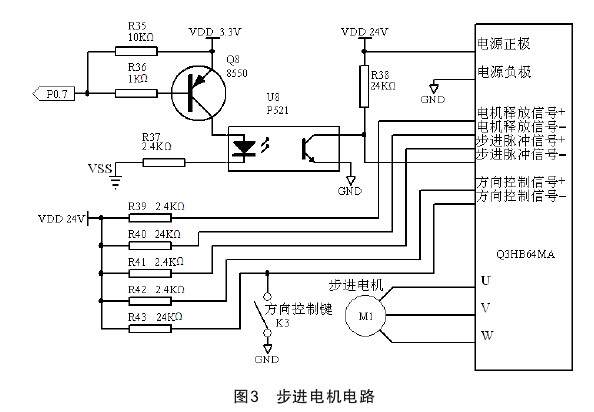
步进电机电路如图3所示。它由电阻R 3 5 ~R43, Q8, U8, K3和驱动器Q3HB64MA组成。
控制驱动器工作的主要有三个信号,它们分别是电机释放信号、步进脉冲信号和方向控制信号。在该电路中,三种信号的正输入端通过限流电阻后,都接在24V电源正端。电机释放信号负端接高电平,系统得电后,实现步进电机始终使能;步进脉冲信号负端受控于微控制器P0.7口,P0.7口由软件设为PWM输出口,它输出调制脉冲(控制步进电机运行的步长信息),通过光电荆合器送给步进脉冲信号负端;方向控制信号负端接方向控制键K3,操作K3键,实现步进电机的正转(反转)控制。
②主轴电机电路。主轴电动机的型号是YLJW80-2/4。YLJW系列力矩三相异步电动机是一种卷绕用电动机。
驱动主轴电动机运行的变频器,选用的是台达变频器VFDO15M23A。由于用于绕制的漆包导线线径较小,绕线时要低速启动,低速停止,线径不同,速度也不同,系统中配VFDO15M23A变频器控制主轴电动机的运行。
主轴电动机控制电路由按键、调速电位器和变频器VFDO15M23A组成。按键是主轴电动机的启动和停止键。调速电位器主要实现手动控制电动机的运行速度。
③电源。系统的电源采用的是标准开关电源,分别提供了3.3V和24V两种直流电压,且它们不共地(这里不详述)。
在软件的设计中设置了六个子程序,较复杂的工作在子程序中实现。
主程序流程框图如图4所示。
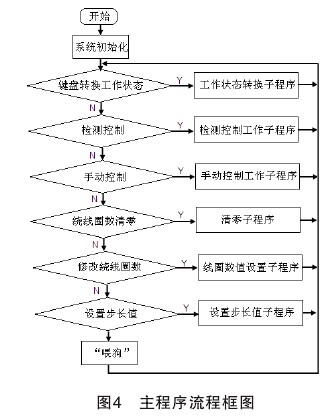
它包括八个部分:系统初始化、转换工作状态判断、检测控制判断、手动控制判断、绕线圈数清零判断、修改绕线圈数判断、设置步长值判断和“喂狗”等。
①系统初始化:主要包括引脚配置初始化、系统参数初始化、中断设定及使能看门狗等。
②转换工作状态判断:若是,则转到工作状态转换子程序。
③检测控制判断:若是,则转到检测控制工作子程序。
④手动控制判断:若是,则转到手动控制工作子程序。
⑤绕线圈数清零判断:若是,则转到清零子程序。
⑥修改绕线圈数判断:若是,则转到线圈数值设置子程序。
⑦设置步长值判断:若是,则转到设置步长值子程序。
⑧“喂狗”:看门狗内部定时器清零。
软件中有六种功能的子程序。
①工作状态转换子程序:主要完成系统工作状态转换,且有指示灯提醒工作状态及“喂狗”。
②检测控制工作子程序:主要完成使能外部中断,允许微控制器接受脉冲,累计并显示绕线圈数值,实现自动控制步进电机的运行及“喂狗”。
③手动控制工作子程序:显示绕线圈数值,实现手动控制步进电机的运行及“喂狗”。
④清零子程序:关闭采集脉冲的外部中断,停止微控制器接受两路脉冲,完成存储绕线圈数值的寄存器都清零及“喂狗”。
⑤线圈数值设置子程序:主要完成线圈数值设置并存储、显示及“喂狗”。
⑥设置步长值子程序:主要完成步长数值设置并存储、显示及“喂狗”。
采用这种硬件设计的控制系统具有响应速度快、精度高、抗干扰能力强、硬件简单、显示直观的优点。绕线机成本低廉、运行可靠,便于操作员快速、准确地控制,提高了高压线圈生产的成品率和效率,已经在企业中得到了成功的应用。
 怡斯麦中文站
怡斯麦中文站 怡斯麦英文站
怡斯麦英文站