绕线机自动调速的工作原理
发布时间:2020-5-6 浏览: 次
本文以编码器、单片机、步进电机为主要部件,设计了一种能自动调速的绕线机,该绕线机结构简单、造价低、可靠性好,可应用于纺织、电气等行业。
图 1 为自动调速绕线机结构示意图。系统由移线子系统和调速子系统组成。移线系统由步进电机 1 、丝杠 2 、右行程开关开关 3 、螺母 4 、左行程开关 5 组成,步进电机 1 的主轴和丝杠 2 的轴连接在一起,螺母4安装在丝杠2上,螺母4上安装有编码器10 ,编码器10 的转轴上安装有橡胶轮 7,线6 压在橡胶轮 7 上,左行程开关5 和右行程开关 3 分别安装在螺母 4 的两侧。移线系统的步进电机1可带动丝杠2转动,丝杠2 可带动螺母 4 移动,螺母 4 可带动编码器 10 和橡胶轮7移动,当螺母4触动行程开关5 ,单片机控制步进电机1反向旋转,当螺母4触动行程开关3 ,单片机会控制步进电机1反向旋转。移线子系统可完成线6的横向移动,使线6均匀地缠绕着绕线轮8上。调速系统由橡胶轮7 、绕线轮8 、步进电机9 、编码器10等主要部分组成,调速系统的步进电机9带动绕线轮8旋转时,线6可绕在绕线轮8上,同时线6可带动橡胶轮7转动,线6的线速度可通过编码器10输出的脉冲获得。
有些行业里输入的线6线速度是恒定的,如步进电机9转速不变,绕线轮8随着缠绕的线的增加绕线的半径会逐渐增大,线6的线速度会逐渐增大,这会造成无法正常绕线,为了保证正常绕线,必须实时调整步进电机9的转速。本文采取以下方法解决线6的线速度恒定问题,绝对值编码器 10 输出的脉冲输送给单片机,单片机定时采集绝对值编码器10送来的脉冲数目,并和设计的值进行比较,当输入值大于设定值时,单片机控制输出脉冲数目,降低绕线轮 8 的转速,维持线 6 的线速度恒定。
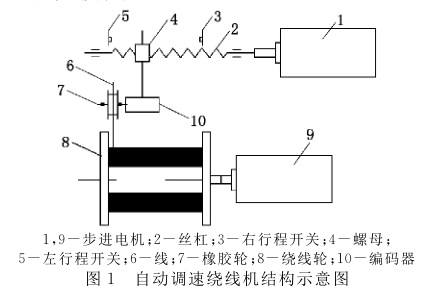
图 1 自动调速绕线机结构示意图
2 、主要元器件的选择和系统电路的连接
2.1 主要元器件的选择
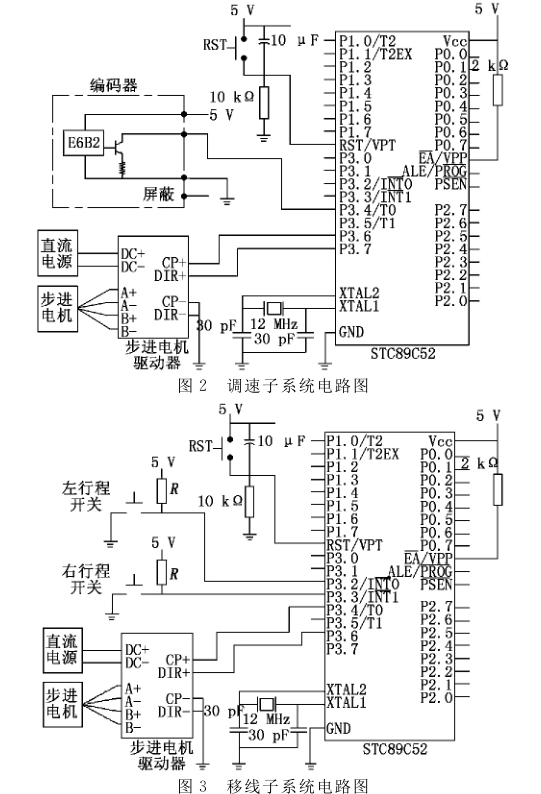
绝对值编码器选用欧姆龙 E6A2 - CS3E ,每转10个脉冲输出,供电电压 5V ,脉冲输出端可直连单片机接口。
单片机选用STC89C52RC ,它是STC公司生产的一种低功耗、高性能CMOS8位微控制器,8kB Flash ,512B的 RAM , 32位I / O口线,看门狗定时器,内置4kB EEPROM , MAX810复位电路, 3个16 位定时器/计数器,4个外部中断,一个7向量4级中断结构(兼容传统51 的 5 向量 2 级中断结构),全双工串行口。
选用 TB6600型号步进电机驱动器,输入直流电压9V~42V ,有过流、过压、欠压、短路等保护。
步进电机选用 57BYG250B ,输出力矩 1.2Nm,二相四根引出线。
2.2 系统的电路连接
3.1 控制系统流程
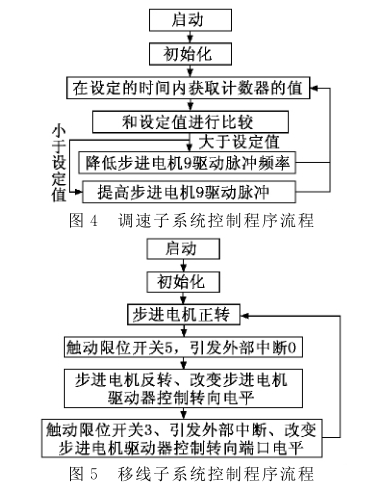
系统软件分为两部分,调速子系统控制程序和移线子系统控制程序。调速子系统控制程序流程如图 4所示,移线子系统控制程序流程如图 5 所示。
4 结束语
本文完成了一种能自动调速的绕线机设计,包括了移线子系统和调速子系统的机械部分的原理性设计、移线子系统和调速子系统的控制系统设计,完成了主要部件的选型、电路的搭接、控制程序的编写。这种能自动调速的全自动绕线机为解决绕线机绕线问题提出了一个新的解决方案,有很强的实用性和推广价值。
系统的设计包括几个方面的内容: ① 系统的总体设计; ② 主要元器件的选择和系统电路的连接;③ 系统程序的编写。
图 1 为自动调速绕线机结构示意图。系统由移线子系统和调速子系统组成。移线系统由步进电机 1 、丝杠 2 、右行程开关开关 3 、螺母 4 、左行程开关 5 组成,步进电机 1 的主轴和丝杠 2 的轴连接在一起,螺母4安装在丝杠2上,螺母4上安装有编码器10 ,编码器10 的转轴上安装有橡胶轮 7,线6 压在橡胶轮 7 上,左行程开关5 和右行程开关 3 分别安装在螺母 4 的两侧。移线系统的步进电机1可带动丝杠2转动,丝杠2 可带动螺母 4 移动,螺母 4 可带动编码器 10 和橡胶轮7移动,当螺母4触动行程开关5 ,单片机控制步进电机1反向旋转,当螺母4触动行程开关3 ,单片机会控制步进电机1反向旋转。移线子系统可完成线6的横向移动,使线6均匀地缠绕着绕线轮8上。调速系统由橡胶轮7 、绕线轮8 、步进电机9 、编码器10等主要部分组成,调速系统的步进电机9带动绕线轮8旋转时,线6可绕在绕线轮8上,同时线6可带动橡胶轮7转动,线6的线速度可通过编码器10输出的脉冲获得。
有些行业里输入的线6线速度是恒定的,如步进电机9转速不变,绕线轮8随着缠绕的线的增加绕线的半径会逐渐增大,线6的线速度会逐渐增大,这会造成无法正常绕线,为了保证正常绕线,必须实时调整步进电机9的转速。本文采取以下方法解决线6的线速度恒定问题,绝对值编码器 10 输出的脉冲输送给单片机,单片机定时采集绝对值编码器10送来的脉冲数目,并和设计的值进行比较,当输入值大于设定值时,单片机控制输出脉冲数目,降低绕线轮 8 的转速,维持线 6 的线速度恒定。
图 1 自动调速绕线机结构示意图
2 、主要元器件的选择和系统电路的连接
2.1 主要元器件的选择
绝对值编码器选用欧姆龙 E6A2 - CS3E ,每转10个脉冲输出,供电电压 5V ,脉冲输出端可直连单片机接口。
单片机选用STC89C52RC ,它是STC公司生产的一种低功耗、高性能CMOS8位微控制器,8kB Flash ,512B的 RAM , 32位I / O口线,看门狗定时器,内置4kB EEPROM , MAX810复位电路, 3个16 位定时器/计数器,4个外部中断,一个7向量4级中断结构(兼容传统51 的 5 向量 2 级中断结构),全双工串行口。
选用 TB6600型号步进电机驱动器,输入直流电压9V~42V ,有过流、过压、欠压、短路等保护。
步进电机选用 57BYG250B ,输出力矩 1.2Nm,二相四根引出线。
2.2 系统的电路连接
调速子系统和移线子系统的电路图分别如图2 、图 3 所示。
3.1 控制系统流程
系统软件分为两部分,调速子系统控制程序和移线子系统控制程序。调速子系统控制程序流程如图 4所示,移线子系统控制程序流程如图 5 所示。
4 结束语
本文完成了一种能自动调速的绕线机设计,包括了移线子系统和调速子系统的机械部分的原理性设计、移线子系统和调速子系统的控制系统设计,完成了主要部件的选型、电路的搭接、控制程序的编写。这种能自动调速的全自动绕线机为解决绕线机绕线问题提出了一个新的解决方案,有很强的实用性和推广价值。
上一篇:全自动绕线机的调试步驟和调试方法
下一篇:漆包线对空心线圈绕制质量的影响