高精度全自动绕线机控制系统的调试运行技术分享
发布时间:2018-12-3 浏览: 次
我们在测试高精度的全自动绕线机时,一般在通过控制系统与机械系统的联调,在满足功能的基础上,验证全自动绕线机系统的可靠性,并通过激光干涉仪,三坐标影像仪的测量数据验证全自动绕线机控制系统的控制精度。具体操作如下:
1、全自动绕线机系统的运行基础
全自动绕线机系统的运行基础,包括整个系统的供电测试,伺服电机点动功能测试,限位测试,驱动器参数设置
1.1 系统供电测试
系统的供电测试,主要是系统上电后,各个系统及控制卡,工控计算机,伺服电机及驱动器的状态指示是否正常。并启动软件,测试运动控制卡与 PCI 总线连接通讯是否正常。然后需要测试各个限位开关的状态信号是否正常。
测试上电前,要求根据配电线路,断开各个轴负载电机,计算机,加热单元供电线路的断路器,确认开关直流电源的输出电源极性。同时检查各个负载,尤其是直流电源的极性!通电后首先检测开关电源的输入输出电压,极性。正常后,逐级闭合接通各个负载的断路器,确认供电无异常后,进行下一步的调试。
1.2 驱动器设置与点动运行
旋转方向默认为正向,但是两个夹持芯杆的伺服电机的方向一定相反,因为这样才能保证二者夹持芯杆保持在实际的运行时的通向旋转启停。
对于绕线机的伺服驱动器调整模式有自动,半自动,和手动模式,一般当选择自动增益调整模式,当增益数据越大,命令跟踪性和定位调整时间越短,但如果过大,则电机产生振动。滚珠丝杠结构一般的参考值为 10-15;但往往为了获得更好的控制效果,大部分情况下需要根据设备的驱动的机械结构和负载情况选择手动模式来调整。
当将伺服驱动器的模式选择为手动模式时,可以手动调整伺服驱动器的负载惯量比,位置增益调节器值,速度应答,速度调节器积分时间,前馈过滤器时间常数,转矩过滤器时间常数。
位置调解增益是决定位置控制回路的应答性的参数。如果增大设定值,则对过载干扰的应答就会加快。但如果设定值过大,则容易产生超程。
速度应答是决定速度控制回路的应答性参数。若降低设定值,则得到重视伺服电机应答性的调整结果,但如果设定值过小,则机械系统容易产生振动。
速度调节器积分时间是决定速度控制回路的应答性参数。若降低设定值,则得到重视伺服电机应答性的调整结果,如果设定值过小,则机械系统容易产生振动。
前馈过滤器时间常数是对位置命令的前馈过滤器以及位置命令设定跟踪性的参数。
它与前馈增益值无关,是一直有效的。若减小该参数,则应答性加快,但容易发生转矩冲击。
转矩过滤器时间常数是对转矩命令进行过滤控制的参数。参数增大,具有抑制机械共振的效果,但有时会破坏控制的稳定性。
总之增益参数的调整的主要目的针对负载惯量比,负载惯量比定义为相对于电机轴的机械系统的负荷惯性矩(电机轴换算负荷惯性矩)与电机惯性矩之比来,惯量比的大小主要是根据参考惯性矩计算公式来确定。
上述为参数只是驱动器的设定必要的设定参数,更多参数设置需参考驱动器用户手册。而且要使得伺服驱动器对电机的性能达到一个理想的效果,绕线机可以调节的参数也很多,另外也可以通过 485 串行通讯对驱动器的各个参数进行设置。而在后期的调试运行中,参数还需要不断的进行微调。
1、全自动绕线机系统的运行基础
全自动绕线机系统的运行基础,包括整个系统的供电测试,伺服电机点动功能测试,限位测试,驱动器参数设置
1.1 系统供电测试
系统的供电测试,主要是系统上电后,各个系统及控制卡,工控计算机,伺服电机及驱动器的状态指示是否正常。并启动软件,测试运动控制卡与 PCI 总线连接通讯是否正常。然后需要测试各个限位开关的状态信号是否正常。
测试上电前,要求根据配电线路,断开各个轴负载电机,计算机,加热单元供电线路的断路器,确认开关直流电源的输出电源极性。同时检查各个负载,尤其是直流电源的极性!通电后首先检测开关电源的输入输出电压,极性。正常后,逐级闭合接通各个负载的断路器,确认供电无异常后,进行下一步的调试。
1.2 驱动器设置与点动运行
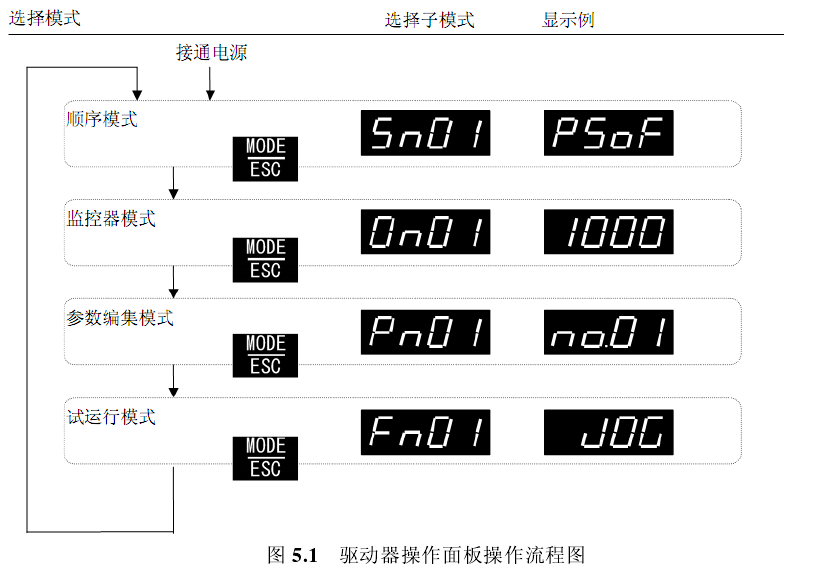
供电工作正常后,需要对伺服驱动器的相关键参数进行设置,设置的内容主要包括,伺服系统的运行工作方式,和相关的 PID 调节参数等。所有的设置过程都需要通过伺服驱动器的控制面板来完成,如图 5.1 所示。
旋转方向默认为正向,但是两个夹持芯杆的伺服电机的方向一定相反,因为这样才能保证二者夹持芯杆保持在实际的运行时的通向旋转启停。
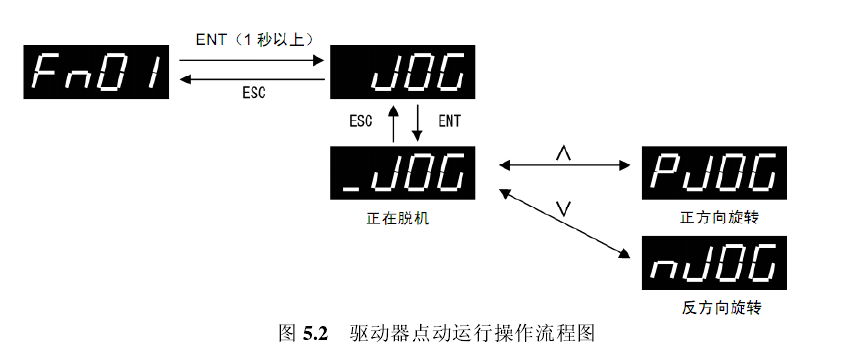
参数设定完成后进入点动运行,通过伺服驱动器的控制面板,分别测试电机运行是否可以手动运行正常。 高精度绕线机控制系统的调试运行点动控制流程如图 5.2 所示。通过点动运行来验证伺服电机的工作状态是否正常。
对于绕线机的伺服驱动器调整模式有自动,半自动,和手动模式,一般当选择自动增益调整模式,当增益数据越大,命令跟踪性和定位调整时间越短,但如果过大,则电机产生振动。滚珠丝杠结构一般的参考值为 10-15;但往往为了获得更好的控制效果,大部分情况下需要根据设备的驱动的机械结构和负载情况选择手动模式来调整。
当将伺服驱动器的模式选择为手动模式时,可以手动调整伺服驱动器的负载惯量比,位置增益调节器值,速度应答,速度调节器积分时间,前馈过滤器时间常数,转矩过滤器时间常数。
位置调解增益是决定位置控制回路的应答性的参数。如果增大设定值,则对过载干扰的应答就会加快。但如果设定值过大,则容易产生超程。
速度应答是决定速度控制回路的应答性参数。若降低设定值,则得到重视伺服电机应答性的调整结果,但如果设定值过小,则机械系统容易产生振动。
速度调节器积分时间是决定速度控制回路的应答性参数。若降低设定值,则得到重视伺服电机应答性的调整结果,如果设定值过小,则机械系统容易产生振动。
前馈过滤器时间常数是对位置命令的前馈过滤器以及位置命令设定跟踪性的参数。
它与前馈增益值无关,是一直有效的。若减小该参数,则应答性加快,但容易发生转矩冲击。
转矩过滤器时间常数是对转矩命令进行过滤控制的参数。参数增大,具有抑制机械共振的效果,但有时会破坏控制的稳定性。
总之增益参数的调整的主要目的针对负载惯量比,负载惯量比定义为相对于电机轴的机械系统的负荷惯性矩(电机轴换算负荷惯性矩)与电机惯性矩之比来,惯量比的大小主要是根据参考惯性矩计算公式来确定。
上述为参数只是驱动器的设定必要的设定参数,更多参数设置需参考驱动器用户手册。而且要使得伺服驱动器对电机的性能达到一个理想的效果,绕线机可以调节的参数也很多,另外也可以通过 485 串行通讯对驱动器的各个参数进行设置。而在后期的调试运行中,参数还需要不断的进行微调。
上一篇:全自动绕线机清洗及维护步骤